A solar plane with multiple rows on the wings will have differnt illumination on each row and on each wing. The last plane had 3 rows x 2 wings. So 6 total channels of power point tracking.
I think the new design is going to be slightly smaller with two rows. The 12 or 13 cells in series will have a max output voltage of ~7.5V. So my system battery/bus voltage will need to be above that.
I'm thinking 6S LiIon.
So I wanted to simulate the power circuitry of the solar mppt system.
I used the LTC Spice and built a singe solar cell model:
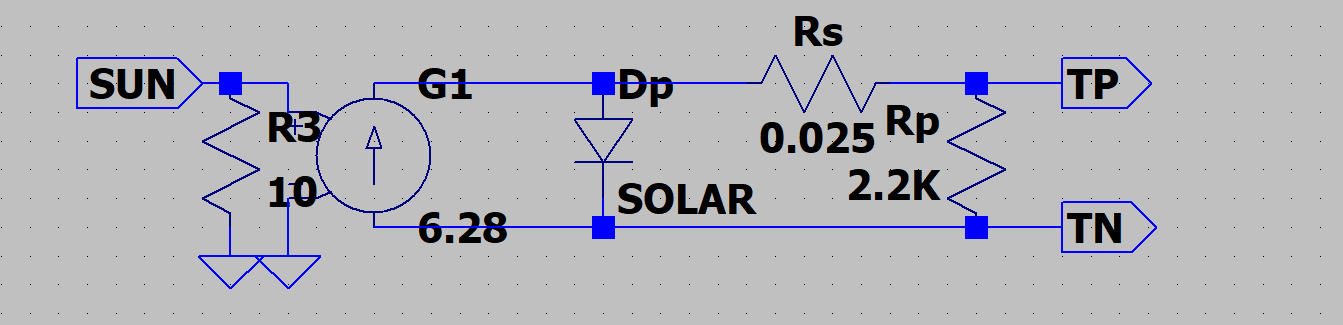
I then combined 10 of these to be a 10 cell array....

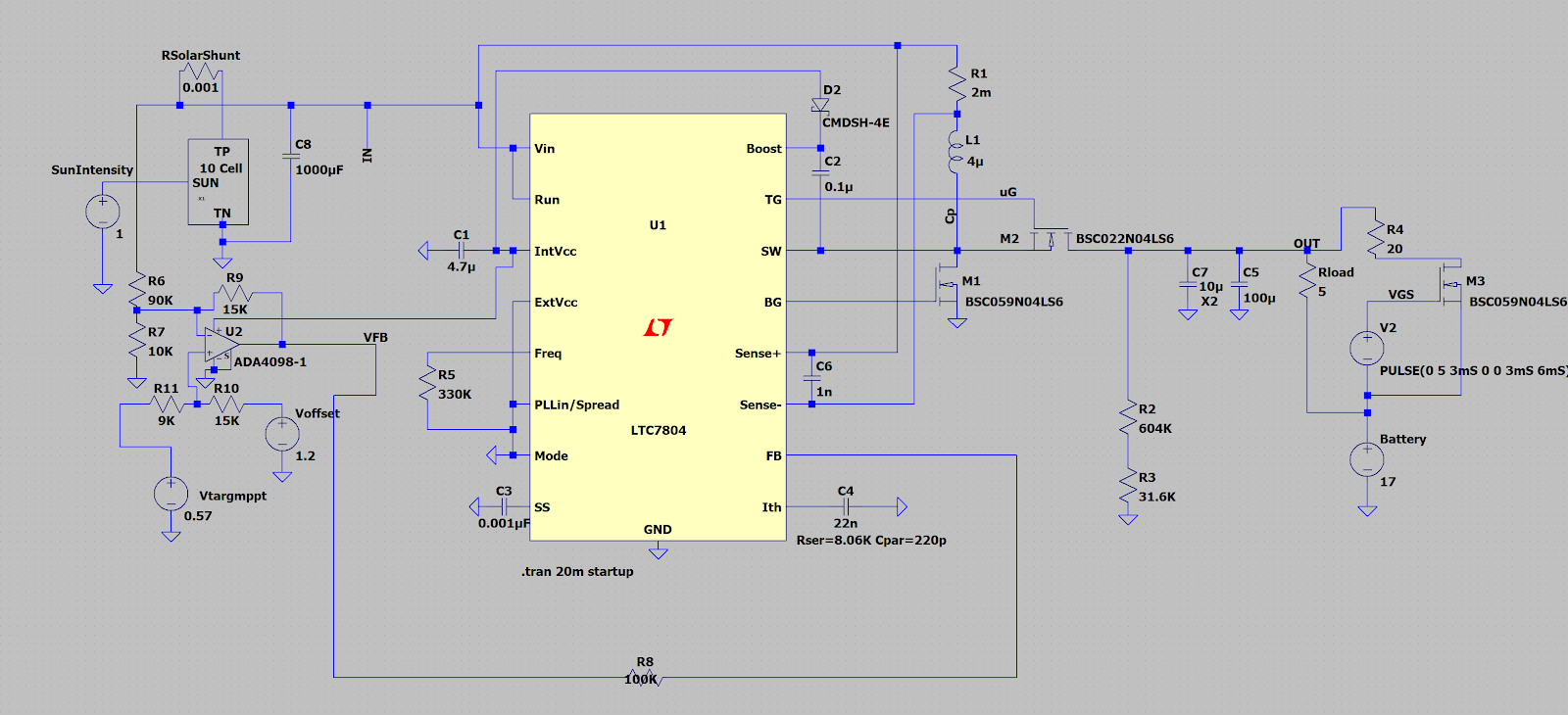
The op amp on the left side inverts, amplifies and offsets the cell array voltage and adapts it to the LTC7804 1.2V reference.
The two voltage sources on the left side Vtargmppt and Voffset will be combined into a low power precision DAC from whatever microcontroller I choose to drive this mess. (One could thevenize the resistance and voltages to form a single source, but since no significant current should flow into the
+ node of the op amp the resistance probably does not really matter.
Basic power path is decided, now to make a couple more decisions and prototype in the real world with a set of real cells.
For deciding the MPPT tracking point there are several choices:
Random path search.
Percentage of Voc (what I chose last time)
Table of V vs Cell temp.
I'll play with all three modes... I'm hoping the cell temp vs V works well.
The data sheet says Vmppt is 5.8V at 25C and is -1.84 mv/deg C.
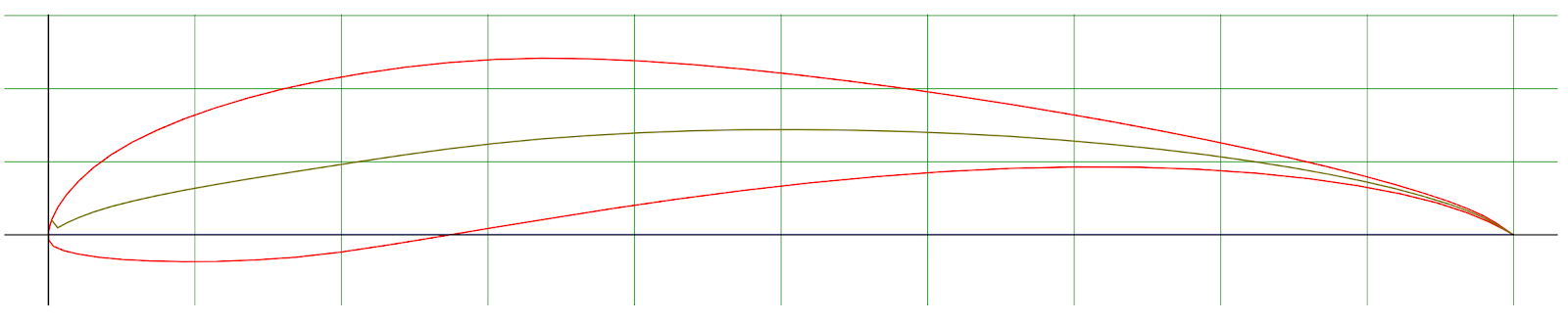
On the airframe front I've also been playing with basic aircraft layout using
XFLR5 to design the airframe. While a solar wing really wants to be rectangular the
improvement in minimum sink with an additional tapered panel is so large that its probably worth doing even if it has no solar cells. (Winglets have same effect, but shadow top side cells so that does not work.)
I really need to get a good target weight I'm comfortable with so I can have a target design and then determine gram/watt sort of sensitivities to make proper power/weight trades.
an example trade would be to add cells to the tailboom. Hard to balance as all the weight is aft and
so will likely need added wt forward. The weight and drag acts 24 hrs a day. Added power is only useful for 12hrs and then requires added battery wt to use the excess power overnight.
Adding panels in the taper tips are at differnt angle/solar incidence than the main wing cells.
So they need their own mppt tracker. does it make sense to add a tracker for 15W of cell
running at 1.5 to 2 V so efficiency will be poor. With the LTC7408 it has synchronous reftification so that should help at low voltages. (Inductor will be smaller as well).
Speaking of inductors I've gotten proper aluminum magnet wire quoted at $2.20/ft and 1Kft minimum order. So I've 3d printed some air core toroid forms and wound un insulated aluminum craft wire on these...made some light inductors....
Trades/Trades/optimizations as far as the eye can see... More later.